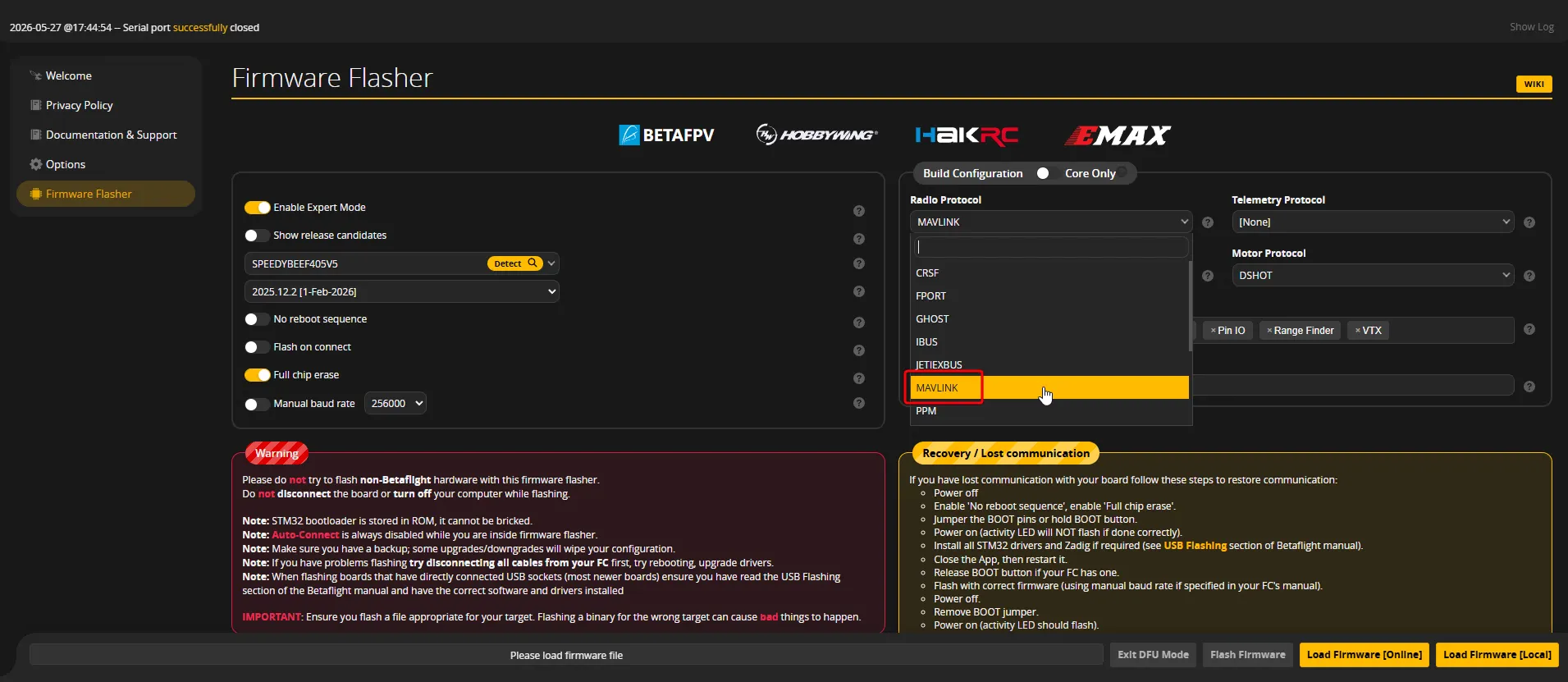
В свежих версиях Betaflight (начиная с 4.5) появилась поддержка «взрослого» протокола MAVLink.
Давайте разберемся, как устроена эта магия, как заставить ее работать в поле без интернета и почему для обычного коптера эта фича, скорее всего, окажется избыточной.
⚡️ TL;DR (Для тех, кому лень читать целиком)
-
Что это: Протокол, позволяющий транслировать полет дрона на карту телефона через Bluetooth пульта.
-
Как смотреть: Качать приложение QGroundControl (ручками с GitHub, в Google Play его нет).
-
Минусы: Betaflight все равно не умеет летать по точкам; MAVLink перегружает радиоканал (придется резать пакетрейты ELRS).
-
Альтернатива: Если нужно просто найти упавший дрон — используйте приложение BFST и стандартный легкий протокол CRSF.
🧐 Что такое MAVLink и как устроена схема?
Если наш привычный протокол управления (CRSF/ELRS) передает «сухие» команды и базовые цифры телеметрии, то MAVLink — это тяжелый, комплексный язык общения для автономных беспилотников. Он упаковывает координаты GPS, высоту, скорость, крен и тангаж в единый поток данных.
Вся цепочка передачи выглядит так:
-
Квадрокоптер ловит спутники ➡️ Полетный контроллер упаковывает данные в MAVLink.
-
Телеметрия улетает на ваш радиопередатчик (ExpressLRS или Crossfire).
-
Пульт принимает данные и ретранслирует их по Bluetooth или Wi-Fi на смартфон.
-
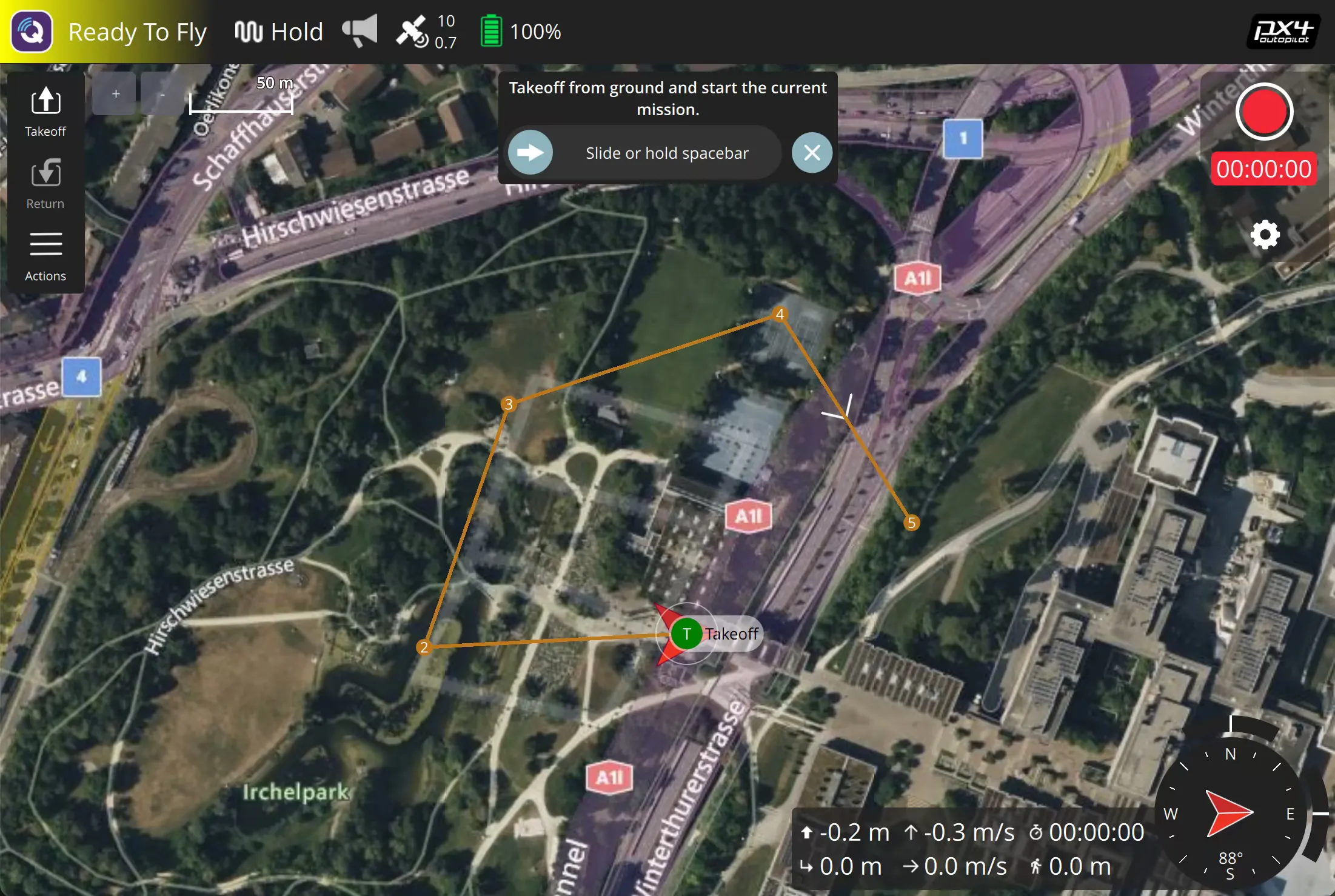
На смартфоне специализированный софт (например, QGroundControl) подхватывает этот поток и рисует маркер дрона на карте.
⚠️ Важный нюанс: Напрямую из Google Play скачать оригинальный QGroundControl не получится — его оттуда удалили. Придется зайти на официальный GitHub разработчиков и установить .apk файл вручную.
🗺 А что делать в поле, если нет интернета?
Смартфон получает от пульта только сухие цифры координат. Чтобы превратить их в картинку, нужна подложка — спутниковые снимки местности.
Туристические навигаторы вроде Maps.me или OsmAnd использовать не получится (они не умеют принимать внешнюю телеметрию с пульта), но полетный софт самодостаточен:
В QGroundControl: Дома через Wi-Fi заходим в настройки ➡️ Offline Maps ➡️ выделяем рамкой нужный сектор поля или леса и скачиваем его в максимальном зуме. В поле приложение подгрузит карту из памяти телефона.
🍋 Почему для Betaflight это избыточно?
Несмотря на всю технологичность, для стандартного FPV-дрона на Betaflight эта связка имеет два жирных минуса (помимо настройки софта):
1. Никакой автономии. Betaflight — прошивка для ручного пилотирования (акро/фристайл). Она физически не умеет летать по точкам. Ткнуть пальцем в экран и отправить дрон на миссию не выйдет. Максимум, что у вас останется — аварийный возврат домой (GPS Rescue).
2. Удар по радиолинку. MAVLink очень «тяжелый». Чтобы пропихнуть его через ExpressLRS, вам придется сильно резать частоту обновления пакетов управления (выставлять низкие пакетрейты вроде 50Hz). Для динамичных полетов это критично.
💡 Есть вариант намного проще
Если цель — просто подстраховаться на случай падения и быстро найти дрон по картам, MAVLink не нужен. Любой пульт и так принимает GPS-координаты по легкому протоколу CRSF. Достаточно подключить телефон к пульту по Bluetooth и запустить легкое приложение вроде BFST (Betaflight Status) или Telemetry Viewer — они отлично кэшируют карты и показывают точку без нагрузки на радиолинк.
📈 Итог
Настроить MAVLink-телеметрию, связать пульт с планшетом и развернуть полноценную наземную станцию в поле — это великолепный опыт для расширения кругозора и разминки мозгов. Вы гарантированно почувствуете себя оператором настоящего ЦУПа Центр управления полётами .
Но для повседневной практики на Betaflight фича малоприменима. Если вам действительно необходимы автономные миссии, полеты по точкам и полноценная работа с картами, ваш путь лежит в сторону навигационных прошивок — INAV или ArduPilot.
Stay tuned.